Zvárací robot OJ-10

V priebehu 80-tich rokov prebiehal vývoj niektorých komponentov riadiaceho systému robota pre zváracie pracovisko s 5 osím robotom OJ-10. Množstvo z týchto komponentov je stále využívaných aj v súčasnosti. Užívatelia týchto pracovísk požiadali o návrh nových pracovných staníc a modernizáciu existujúcich riadiacich systémov robota.
Spoločnosť Rapčan Servis Detva, poskytujúca servis týchto pracovísk, požiadala českú spoločnosť MEFI, s.r.o, o vývoj nového riadiaceho boxu. Nový, moderný riadiaci systém založený na EtherCAT pre zváracieho robota OJ-10 je na obrázku 1. Na obrázku 2 je rameno robota osadené novými servopohonmi. Členovia oddelenia senzorických systémov vyvinuli nový riadiaci software pre zváracieho robota OJ-10 s novou riadiacou jednotkou a servopohonmi.
Príslušné publikácie:
- Andris, P., Building an Embedded System Based on the Initial RAM Disk, Open Source for You, Vol.2, Nr.1, 2013 pdf
- Andris, P., Dobrovodsky, K., Developing an Embedded System Based on a Real-Time Version of Linux, Proc. of the 23rd International Conference on Robotics in Alpe-Adria-Danube Region, CD, ISBN 978-80-227-4219-1, IEEE catalog no.34043, Sep 3-5, Smolenice, Slovakia, 2014, link
Kontaktné osoby:
Doc. Ing. Karol Dobrovodský, PhD.; RNDr. Pavel Andris, CSc.

Platforma pre testovanie poddajných štruktúr
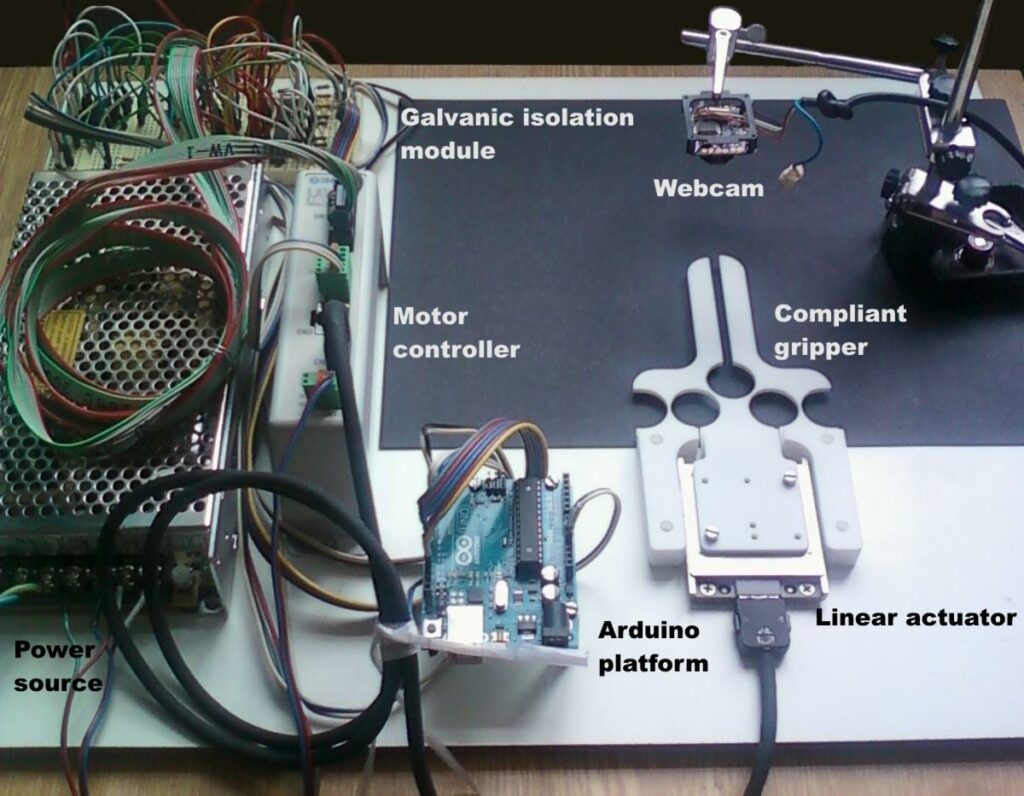
Účel tohto testovacieho zariadenia spočíva v možnostiach verifikácie výkonnostných charakteristík rôznych poddajných štruktúr využívaných v robotike (napr. mechanizmy, uchopovače a mechanické zosilňovače). Táto platforma umožňuje využiť HIL (Hardware-in-the-loop) a SIL (Software-in-the-loop) simulácie ako vhodný nástroj pri návrhu komplexných mechatronických zariadení. Pre vykonanie prvých experimentov bolo navrhnuté prepojenie medzi akčným členom a riadiacim systémom pracujúcim v prostredí MATLAB, čo umožňuje využitie bežných priemyselných pohonov. Pre polohovú spätnú väzbu boli použité dva prístupy – enkodér v lineárnom pohone a spracovanie obrazu z web kamery. Určitá nevýhoda súčasnej realizácie sú relatívne nízke pracovné frekvencie.
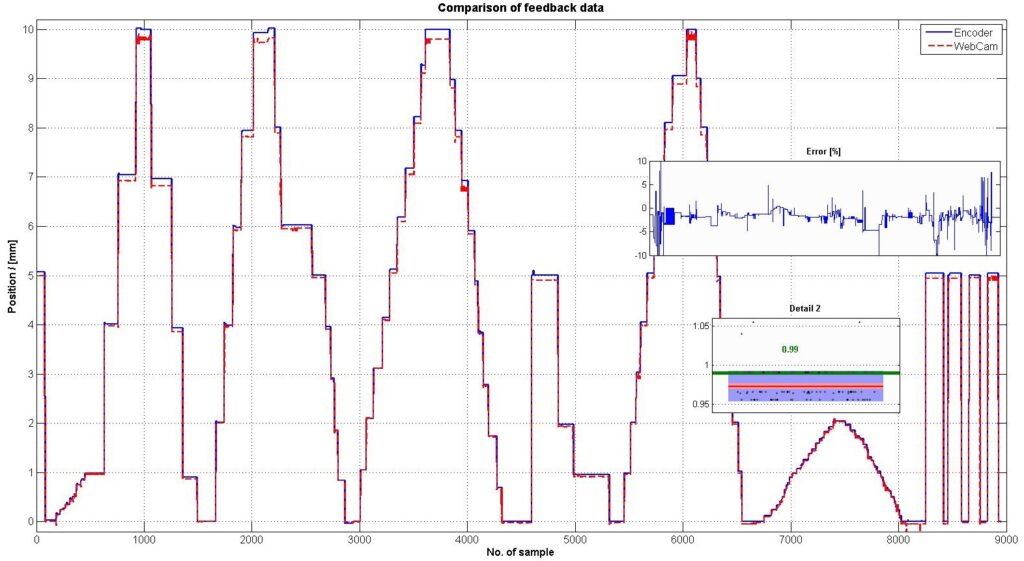
Platforma zároveň umožňuje testovanie a verifikáciu riadiacich algoritmov (riadenie akčného člena, snímanie polohy, spracovanie obrazu, atď.). Využitím tejto experimentálnej platformy je možné dosiahnuť optimálny návrh mikro-robotického zariadenia aby spĺňal požadované funkčné charakteristiky.
Príslušné publikácie:
HRICKO, J. Experimental platform for performance tests of compliant robotic devices. In Advances in Robot Design and Intelligent Control: Proceedings of the 24th International Conference on Robotics in Alpe-Adria-Danube Region (RAAD); Springer ; Switzerland, 2015, advances in Intelligent Systems and Computing, vol. 371, p. 37-45. ISBN 978-3-319-21289-0.ISSN 2194-5357. Type: AECA link
HRICKO, J., VAGAŠ, M. Interconnection between industrial small/micro linear actuator and MATLAB replacement of PLC controller for intelligent robotic systems. In Transfer inovácií, 2014, vol. 30, p. 141-145. ISSN 1337-7094. Type: BDF pdf
Kontaktné osoby:
Ing. Štefan Havlík, DrSc., Ing. Jaroslav Hricko, PhD.
Deformačné časti pre snímače sily resp. posunutia

Boli vyvinuté poddajné štruktúry pre jedno- a dvoj- osé snímače sily resp. posunutia. Na prenos informácie o snímanej veličine je využitý bezkontaktný prenos. Vzhľadom na to bolo pri návrhu týchto štruktúr potrebné splniť špecifické požiadavky ako napr. materiál celej štruktúry, výstupný pohyb – ohybové charakteristiky a pod.
Prvy obrazok: Deformácia a vznikajúce napätie pre jednozložkový snímač
Druhy obrazok: Animácia deformácie xy snímača sily resp. posunutia
Kontaktné osoby:
Ing. Štefan Havlík, DrSc., Ing. Jaroslav Hricko, PhD.
Aplikácie oddelenia elektrónovej litografie
- Aplikácie, v ktorých je potrebná litografia: mikroelektronika, optoelektronika, fotonika, senzory, mikro-elektro-mechanické systémy, nanotechnológie.
- Príprava štruktúr v sub-mikrometrovej oblasti rozmerov metódou priamej viacúrovňovej elektrónovej litografie na podložkách s priemerom až do 160 mm.
- Príprava masiek pre reaktívne iónové leptanie (RIE)
- Príprava štruktúrovaných povrchov pre nanotechnológie.
- Príprava tenkých vrstiev – metódami magnetrónového naprašovania a naparovania elektrónovým lúčom.
- Výroba fotomasiek pre UV a dUV fotolitografiu.