| Aplikácie oddelenia senzorických systémov |
| Zvárací robot OJ-10 |
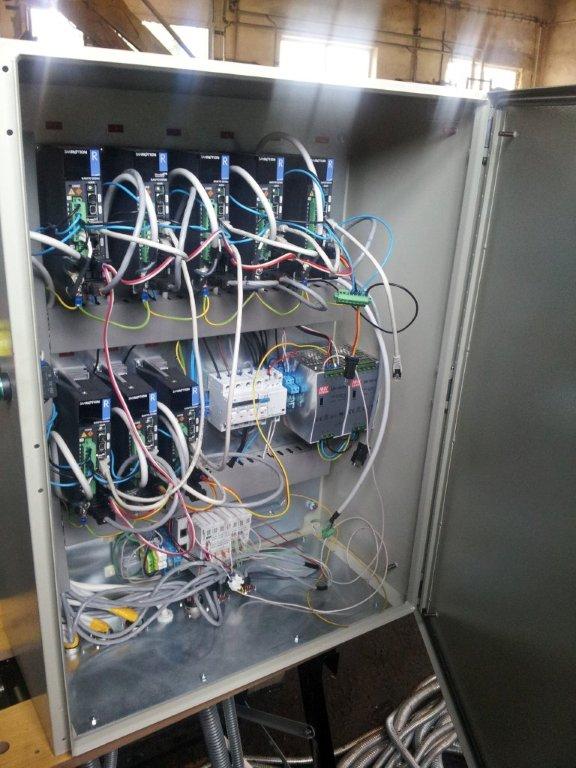 Obr. 1. Riadiaca skriňa zváracieho robota OJ-10 V priebehu 80-tich rokov prebiehal vývoj niektorých komponentov riadiaceho systému robota pre zváracie pracovisko s 5 osím robotom OJ-10. Množstvo z týchto komponentov je stále využívaných aj v súčasnosti. Užívatelia týchto pracovísk požiadali o návrh nových pracovných staníc a modernizáciu existujúcich riadiacich systémov robota.  Obr. 2. Rameno robota OJ-10 s novými servopohonmi Príslušné publikácie:
Kontaktné osoby: |
| Platforma pre testovanie poddajných štruktúr |
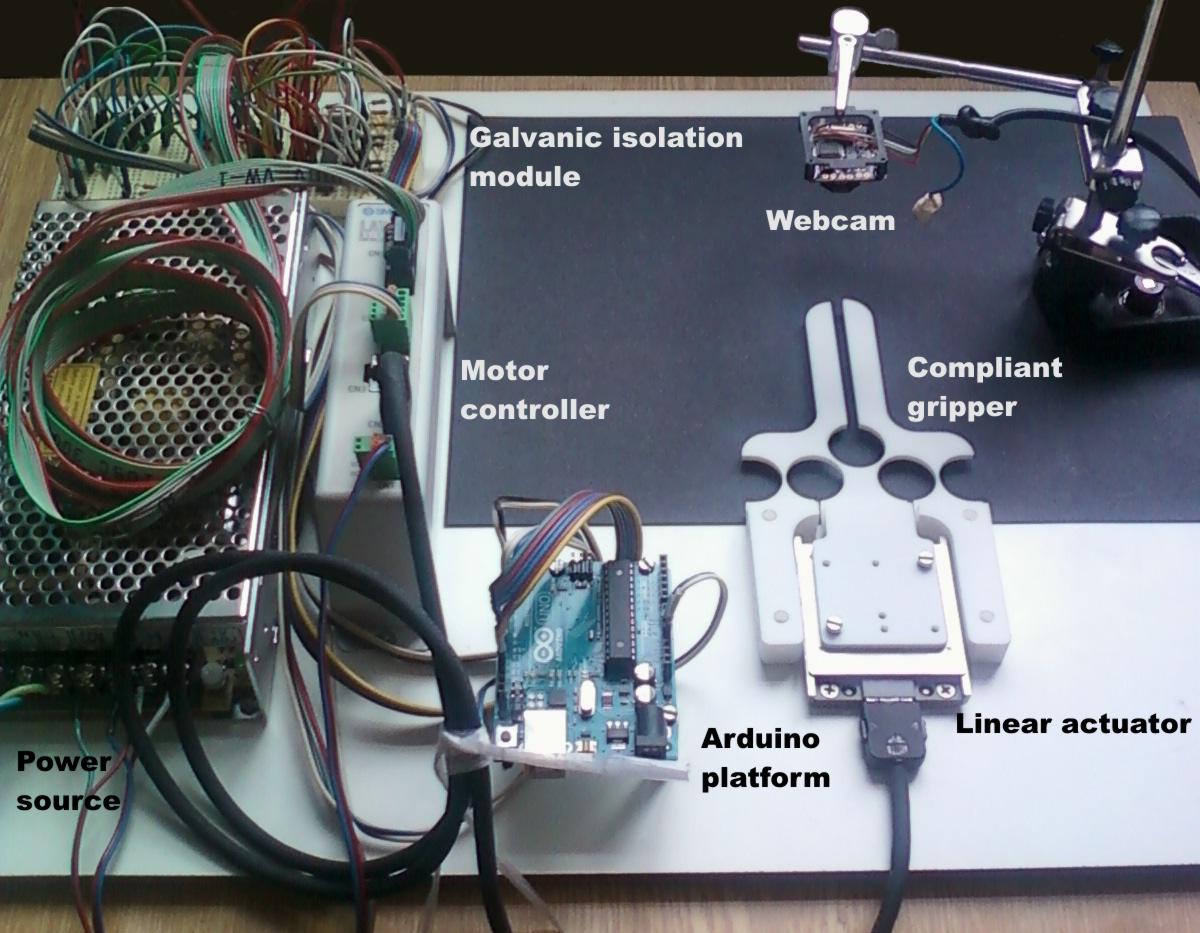 Experimentálna platforma pre testovanie poddajných štruktúr Účel tohto testovacieho zariadenia spočíva v možnostiach verifikácie výkonnostných charakteristík rôznych poddajných štruktúr využívaných v robotike (napr. mechanizmy, uchopovače a mechanické zosilňovače). Táto platforma umožňuje využiť HIL (Hardware-in-the-loop) a SIL (Software-in-the-loop) simulácie ako vhodný nástroj pri návrhu komplexných mechatronických zariadení. Pre vykonanie prvých experimentov bolo navrhnuté prepojenie medzi akčným členom a riadiacim systémom pracujúcim v prostredí MATLAB, čo umožňuje využitie bežných priemyselných pohonov. Pre polohovú spätnú väzbu boli použité dva prístupy – enkodér v lineárnom pohone a spracovanie obrazu z web kamery. Určitá nevýhoda súčasnej realizácie sú relatívne nízke pracovné frekvencie.  Polohová spätná väzba – spracovanie obrazu 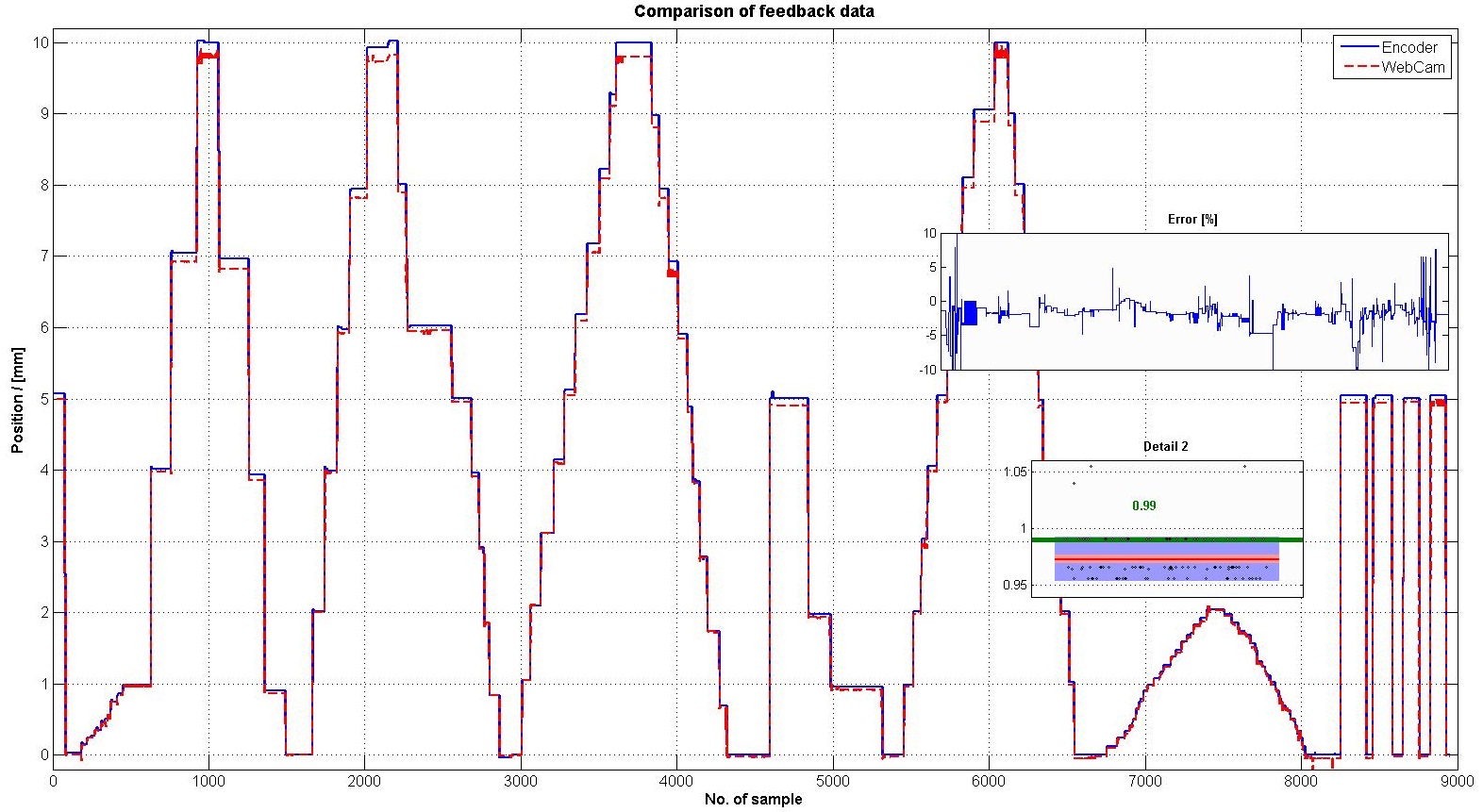 Porovnanie údajov z polohových spätných väzieb Platforma zároveň umožňuje testovanie a verifikáciu riadiacich algoritmov (riadenie akčného člena, snímanie polohy, spracovanie obrazu, atď.). Využitím tejto experimentálnej platformy je možné dosiahnuť optimálny návrh mikro-robotického zariadenia aby spĺňal požadované funkčné charakteristiky. Príslušné publikácie:
Kontaktné osoby: |
| Deformačné časti pre snímače sily resp. posunutia |
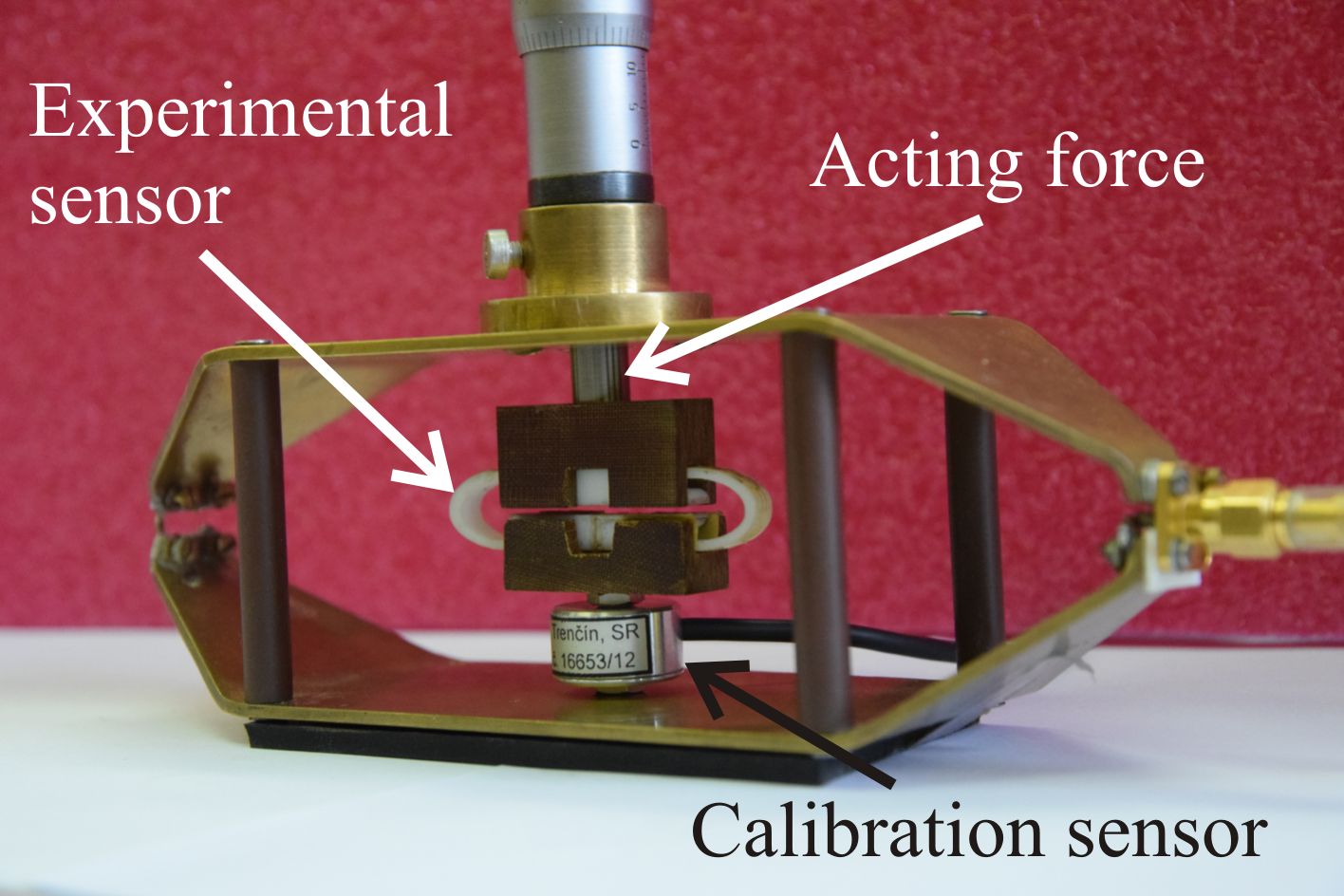 Boli vyvinuté poddajné štruktúry pre jedno- a dvoj- osé snímače sily resp. posunutia. Na prenos informácie o snímanej veličine je využitý bezkontaktný prenos. Vzhľadom na to bolo pri návrhu týchto štruktúr potrebné splniť špecifické požiadavky ako napr. materiál celej štruktúry, výstupný pohyb – ohybové charakteristiky a pod. Boli vyvinuté poddajné štruktúry pre jedno- a dvoj- osé snímače sily resp. posunutia. Na prenos informácie o snímanej veličine je využitý bezkontaktný prenos. Vzhľadom na to bolo pri návrhu týchto štruktúr potrebné splniť špecifické požiadavky ako napr. materiál celej štruktúry, výstupný pohyb – ohybové charakteristiky a pod.
Kontaktné osoby:  Deformácia a vznikajúce napätie pre jednozložkový snímač  Animácia deformácie xy snímača sily resp. posunutia |
Veda je budúcnosť: Vitajte na stránkach Ústavu informatiky Slovenskej akadémie vied, Bratislava