| Aplikácie oddelenia modelovania a riadenia diskrétnych procesov |
| SIMPPA – Satelite Image Processing for Precision Agriculture |
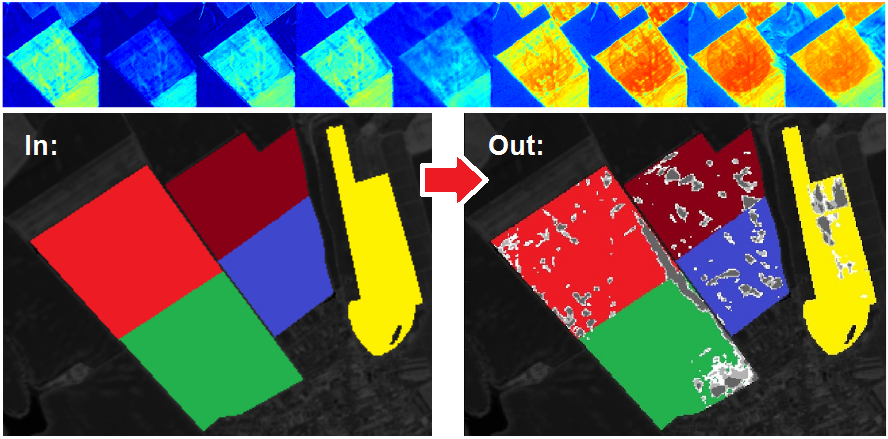 SIMPPA je nová služba Ústavu Informatiky pre spracovanie a vyhodnocovanie satelitných snímkov družice typu Sentinel. Služba umožňuje spracovanie satelitných spektrálnych snímok pre identifikáciu priestorovej a časovej variability pôdnych vlastností a poľnohospodárskych porastov. Takéto spracovanie údajov je možné využiť na predikciu vývoja pôdnych vlastností resp. identifikácie biotického/abiotického stresu porastov. SIMPPA je nová služba Ústavu Informatiky pre spracovanie a vyhodnocovanie satelitných snímkov družice typu Sentinel. Služba umožňuje spracovanie satelitných spektrálnych snímok pre identifikáciu priestorovej a časovej variability pôdnych vlastností a poľnohospodárskych porastov. Takéto spracovanie údajov je možné využiť na predikciu vývoja pôdnych vlastností resp. identifikácie biotického/abiotického stresu porastov.Pre využitie tejto služby je potrebná registrácia prostredníctvom formulára (Reg. formulár). Následne Vám budú zaslané inštrukcie ako využívať danú službu. V prípade akýchkoľvek otázok Nás môžete kontaktovať na: zelenka@savba.sk. Príslušné publikácie
|
| OptiMAT |
 Program OptiMAT je vytvorený v programovom prostredí MATLAB, umožňuje simuláciu objednávok na výrobných linkách v priestoroch firmy MAT-obaly s.r.o. Pri simulácii výroby LDPE fólie sa uvažuje regranulačná linka, vyfukovacie linky (Ex1-Reifenhauser, Ex2-Formac, Ex3-Bandera, Ex4-Knauf), rolovacie linky (Rs1-Rollomatic, Rs2-Fass) a manuálny proces balenia. Namerané dáta (spotreba elektrickej energie, …), plánovaná údržba (plánovaná údržba strojov, resp. je možné simulovať krátkodobú poruchu výrobnej linky), aktuálny stav výroby (môže sa nastaviť ručne alebo automaticky načítať napr. z google kalendára) a objednávky, ktoré je potrebné rozvrhnúť na jednotlivé výrobné linky, slúžia ako vstupné parametre pre simuláciu a následnú optimalizáciu výroby. Metóda rozvrhovania je založená na PSO (Particle Swam Optimization) algoritme. Program OptiMAT je vytvorený v programovom prostredí MATLAB, umožňuje simuláciu objednávok na výrobných linkách v priestoroch firmy MAT-obaly s.r.o. Pri simulácii výroby LDPE fólie sa uvažuje regranulačná linka, vyfukovacie linky (Ex1-Reifenhauser, Ex2-Formac, Ex3-Bandera, Ex4-Knauf), rolovacie linky (Rs1-Rollomatic, Rs2-Fass) a manuálny proces balenia. Namerané dáta (spotreba elektrickej energie, …), plánovaná údržba (plánovaná údržba strojov, resp. je možné simulovať krátkodobú poruchu výrobnej linky), aktuálny stav výroby (môže sa nastaviť ručne alebo automaticky načítať napr. z google kalendára) a objednávky, ktoré je potrebné rozvrhnúť na jednotlivé výrobné linky, slúžia ako vstupné parametre pre simuláciu a následnú optimalizáciu výroby. Metóda rozvrhovania je založená na PSO (Particle Swam Optimization) algoritme.Príslušné publikácie
|
| VERA |
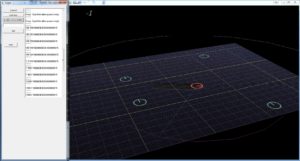 Softvérová aplikácia VERA vznikla v rámci projektu BioMRCS. VERA umožňuje simulovať pohyb virtuálnych robotov vo virtuálnom priestore na základe stanovenej metódy. Je vytvorená v jazyku C++ s využitím OpenGL knižníc . Tento nástroj umožňuje nastavovať a meniť všetky dôležité parametre simulácie (počet častíc, akčný rádius snímačov robota, rádius rozmiestňovania feromónu, atď.). Činnosť agentov v skupine je vizualizovaná v trojrozmernom priestore, pričom užívateľ môže sledovať dôležité vektory určujúce pohyb jednotlivých agentov. Prostredníctvom farebného rozlíšenia štvorcových elementov mapy sú odlíšené preskúmané oblasti od nepreskúmaných. Vyprchávanie feromónových značiek je znázornené pomocou tmavnúcej farby zodpovedajúceho štvorca. Tento softvér je navrhnutý ako samostatná aplikácia, ktorá umožňuje simulovať chovanie agentov popísané pomocou matematických rovníc. Softvérová aplikácia VERA vznikla v rámci projektu BioMRCS. VERA umožňuje simulovať pohyb virtuálnych robotov vo virtuálnom priestore na základe stanovenej metódy. Je vytvorená v jazyku C++ s využitím OpenGL knižníc . Tento nástroj umožňuje nastavovať a meniť všetky dôležité parametre simulácie (počet častíc, akčný rádius snímačov robota, rádius rozmiestňovania feromónu, atď.). Činnosť agentov v skupine je vizualizovaná v trojrozmernom priestore, pričom užívateľ môže sledovať dôležité vektory určujúce pohyb jednotlivých agentov. Prostredníctvom farebného rozlíšenia štvorcových elementov mapy sú odlíšené preskúmané oblasti od nepreskúmaných. Vyprchávanie feromónových značiek je znázornené pomocou tmavnúcej farby zodpovedajúceho štvorca. Tento softvér je navrhnutý ako samostatná aplikácia, ktorá umožňuje simulovať chovanie agentov popísané pomocou matematických rovníc.  Aplikácia bola použitá na stanovenie dôležitých parametrov simulácie, odladenie navrhovaného algoritmu a vyhodnotenie úrovne koordinácie robotov vo virtuálnej skupine, čo je nevyhnutný krok pred implementáciou metódy na reálne laboratórne roboty. Aplikácia bola použitá na stanovenie dôležitých parametrov simulácie, odladenie navrhovaného algoritmu a vyhodnotenie úrovne koordinácie robotov vo virtuálnej skupine, čo je nevyhnutný krok pred implementáciou metódy na reálne laboratórne roboty.
Príslušné publikácie
|
| APM planer |
 V rámci projektu BioMRCS vznikla softvérová aplikácia APM planer, ktorá slúži na zber dát z jednotlivých autonómnych robotických zariadení (multi-rotorové UAV založené na Arduino platforme) počas testovania navrhnutých metód prehľadávania a stráženia definovaného priestoru. Aplikácia podporuje obojsmernú komunikáciu medzi UAV a pozemnou stanicou prostredníctvom MAVLink protokolu. V rámci projektu BioMRCS vznikla softvérová aplikácia APM planer, ktorá slúži na zber dát z jednotlivých autonómnych robotických zariadení (multi-rotorové UAV založené na Arduino platforme) počas testovania navrhnutých metód prehľadávania a stráženia definovaného priestoru. Aplikácia podporuje obojsmernú komunikáciu medzi UAV a pozemnou stanicou prostredníctvom MAVLink protokolu.Prezentačné videá z testovania riadiaceho systému vo vonkajšom prostredí s multi-rotorovým UAV alebo skupinou multi-rotorových UAV je možné zhliadnuť. Príslušné publikácie
|
| Staršie softvérové aplikácie: |
|
Veda je budúcnosť: Vitajte na stránkach Ústavu informatiky Slovenskej akadémie vied, v. v. i., Bratislava