| Applications of the Discrete processes modelling and control department |
| OptiMAT |
 The OptiMAT software tool is created in the MATLAB. He allows simulation of orders for production lines in the MAT-obaly s.r.o company. A regranulation line, extruders (Ex1-Reifenhauser, Ex2-Formac, Ex3-Bandera, Ex4-Knauf), rolling lines (Rs1-Rollomatic, Rs2-Fass) and manual process of packaging are taken into consideration during the LDPE foil production. A measured data (electricity consumption, etc.), scheduled maintenance (scheduled maintenance individual lines, respectively it is possible to simulate a short breakdown of the production line), an actual state of production (it can be set manually or automatically loaded from planning calendar – we use google calendar) and orders that needs to be scheduled on production lines, serve as input parameters for the simulation and production process optimization. Scheduling method is based on PSO (Particle Swarm Optimization) algorithm. The OptiMAT software tool is created in the MATLAB. He allows simulation of orders for production lines in the MAT-obaly s.r.o company. A regranulation line, extruders (Ex1-Reifenhauser, Ex2-Formac, Ex3-Bandera, Ex4-Knauf), rolling lines (Rs1-Rollomatic, Rs2-Fass) and manual process of packaging are taken into consideration during the LDPE foil production. A measured data (electricity consumption, etc.), scheduled maintenance (scheduled maintenance individual lines, respectively it is possible to simulate a short breakdown of the production line), an actual state of production (it can be set manually or automatically loaded from planning calendar – we use google calendar) and orders that needs to be scheduled on production lines, serve as input parameters for the simulation and production process optimization. Scheduling method is based on PSO (Particle Swarm Optimization) algorithm.
Relevant publications:
|
| VERA |
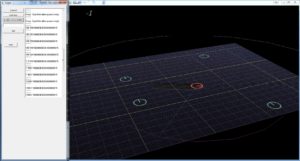 The VERA software application was made by BioMRCS project. The VERA enables motion simulation of virtual robots in the virtual space based on a specified method. He is created in C++ programing language using the OpenGL library. This tool allows you to set and change all relevant simulation parameters (number of particles in swarm, robot’s sensors radius, deployment of pheromone, etc.). Activity of agents in the group is visualized in three dimensional space, where the user can watch major vectors determining the movement of individual agents. Through color-coded maps of square elements are distinguished explored areas from unexplored. Pheromone evaporation is illustrated by darkening the appropriate color squares. The VERA software application was made by BioMRCS project. The VERA enables motion simulation of virtual robots in the virtual space based on a specified method. He is created in C++ programing language using the OpenGL library. This tool allows you to set and change all relevant simulation parameters (number of particles in swarm, robot’s sensors radius, deployment of pheromone, etc.). Activity of agents in the group is visualized in three dimensional space, where the user can watch major vectors determining the movement of individual agents. Through color-coded maps of square elements are distinguished explored areas from unexplored. Pheromone evaporation is illustrated by darkening the appropriate color squares.  The application was used to determine the important parameters of the simulation, debugging and evaluation of the proposed algorithm for coordination robots in a virtual group, which is a necessary step before the implementation of methods to real robots. The application was used to determine the important parameters of the simulation, debugging and evaluation of the proposed algorithm for coordination robots in a virtual group, which is a necessary step before the implementation of methods to real robots.
Relevant publications:
|
| APM planer |
 The APM planer software application have been creeated during the project BioMRCS. This application ensures duplex communication between a robot (quad-rotor UAV based on Arduino platform) and a ground control unit. A communication is based on MAVlink protocol. Biologically inspired method (abstract model of the method can be represented as a decentralized adaptive system with a shared memory which represents the environment) was developed to solve exploration or monitoring tasks. The APM planer software application have been creeated during the project BioMRCS. This application ensures duplex communication between a robot (quad-rotor UAV based on Arduino platform) and a ground control unit. A communication is based on MAVlink protocol. Biologically inspired method (abstract model of the method can be represented as a decentralized adaptive system with a shared memory which represents the environment) was developed to solve exploration or monitoring tasks.Relevant videos from the outdoor system testing with quad-rotor UAV or swarm of quad-rotor UAV are viewable. Relevant publications:
|
| Old-style software applications: |
|
Science is the future: Welcome to the Institute of Informatics, Slovak Academy of Sciences, Bratislava, Slovakia